最新ファームウェアでは点群生成方式に「位相シフト 3位相方式」を採用しました。従来の「位相シフト グレイコード方式」からどの様に点群の品質が変わったのか比較検証を行いました。
・検証環境
・ワーキングディスタンス:約400mm
・ワーク:プラスチックコネクタ(半透明・白)

・カメラ解像度:SXGA(1280×1024)
・撮影条件:
- カメラの露光時間は、旧ファームウェアと最新ファームウェアで使用できる範囲、値が異なります。その為、なるべく近い値同士で比較を行っています。
- カメラのゲインについては、値を大きくするとノイズが発生し、点群品質に影響があるため全て「0」としています。
・作業用PCスペック
OS:Windows 10 Professional
CPU:Core i7-6500U 2.6GHz
Memory:8GB
内蔵ストレージ:SSD(SK Hynix SSD 256GB SATA6Gbps)
・検証結果
ワークの撮影風景は下図の様になります。

各ファームウェアで生成された点群データの比較は次の通りです。
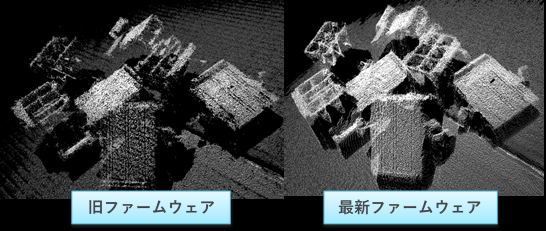
下図は上方向から見た3Dデータです。
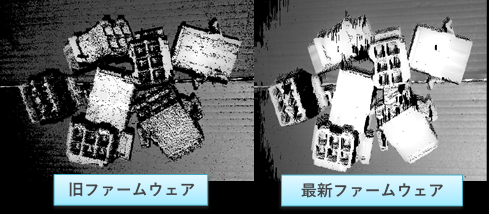
下図は右斜上方向から見た3Dデータです。

最新ファームウェの方が目に見えてワークの隙間が埋まっている事が分かります。ワーク付近の点群数を比較してみた所、旧ファームウェア「53,788点」、最新ファームウェア「99,634点」と約「1.8倍」の点群数になっています。
最新ファームウェアでは、旧ファームウェアよりデータの欠落が減り、正確に形状を捉える為のデータが増加している事が分かります。
以上が、今回のYCAM3Dファームウェア更新内容になります。これからも皆様にご期待に沿える様、品質向上、機能改善に努めてまいりますのでよろしくお願いいたします。