



ソリューション/実績
- ホーム
- ソリューション/実績
- AIデパレタイジング
AIデパレタイジング
マスターレス、変形に対応各種判定、取り順制御
機能・特徴
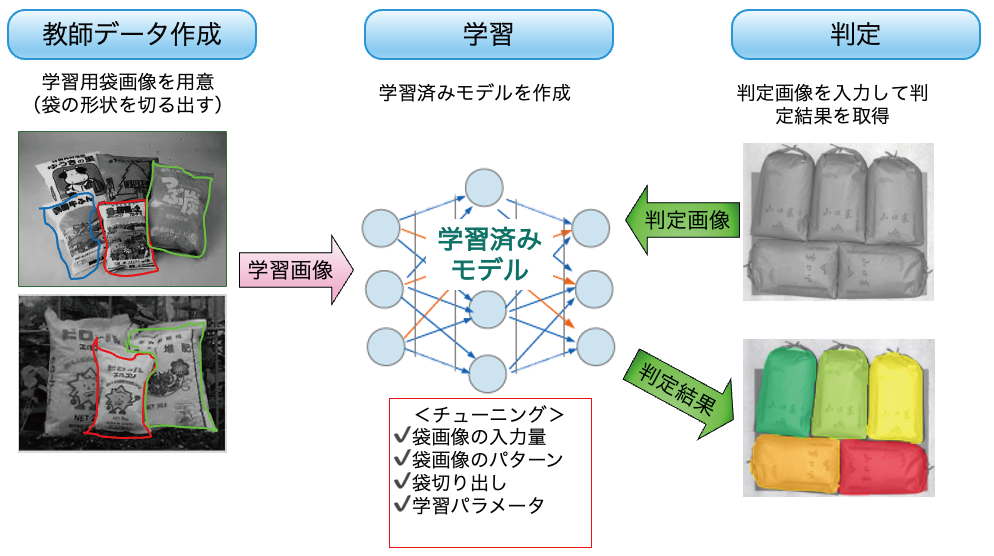
学習モデル
袋専用に教示した学習済モデルを用いることにより、すぐに袋を認識できます。
以下の手順で実ワークの写真(30〜50枚程度)を追加することで認識率が向上します。
AI袋物認識ソフト
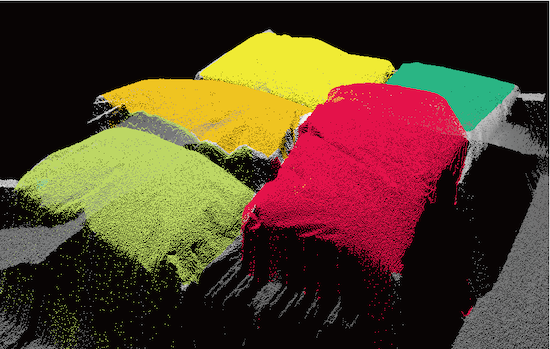
これまで難しかった充填が偏った袋や重なり合う袋の認識が可能になりました。
3Dロボットビジョンと深層学習の組み合わせにより、パレット上に積まれた重なり合う不定形な袋も安定して認識することができるようになりました。また、単に深層学習による認識に頼るのではなく、3D,2Dのデータを併用することにより、現場で使える袋認識、袋の位置・姿勢認識結果を出力します。
■ 寸法チェック(サイズ、アスペクト比、面積比率)により誤認識の防止
■ 一つ下の段の製品を先にピッキングする事を防止する為、最上段の袋のみ検出
■ 同じ層にある複数の製品のピッキング順など条件設定可能
仕様
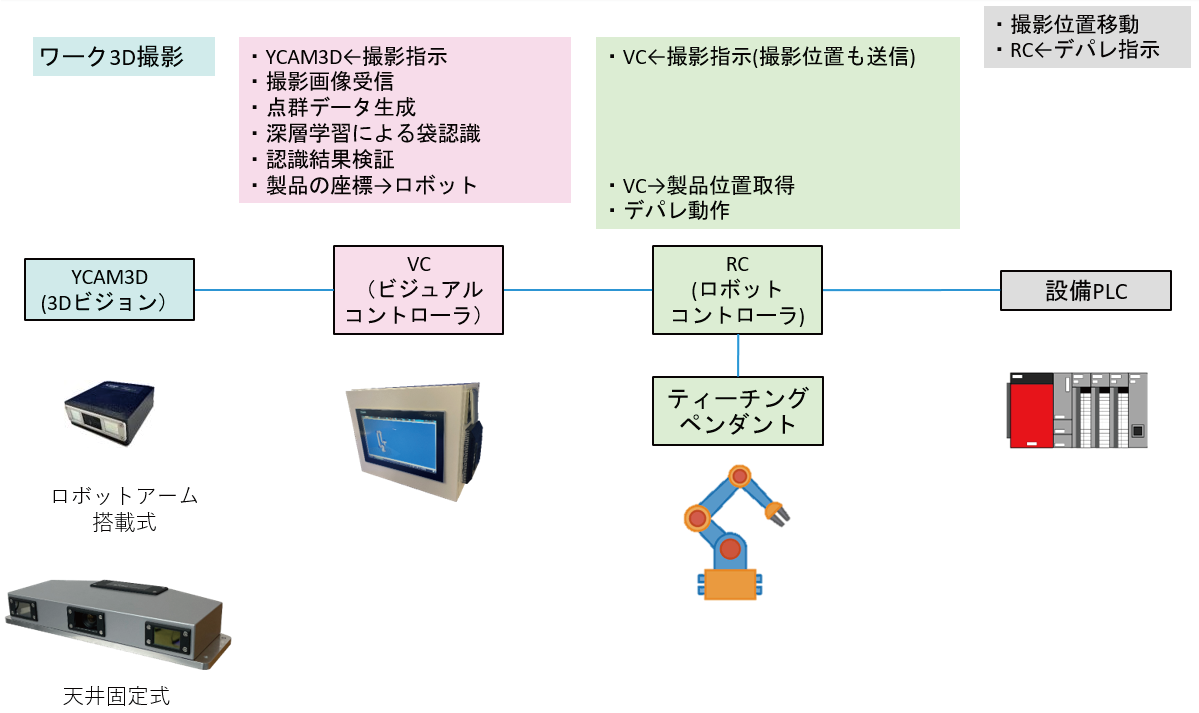
システム構成と動作フロー
袋専用に教示した学習済モデルを用いることにより、すぐに袋を認識できます。
以下の手順で実ワークの写真(30〜50枚程度)を追加することで認識率が向上します。
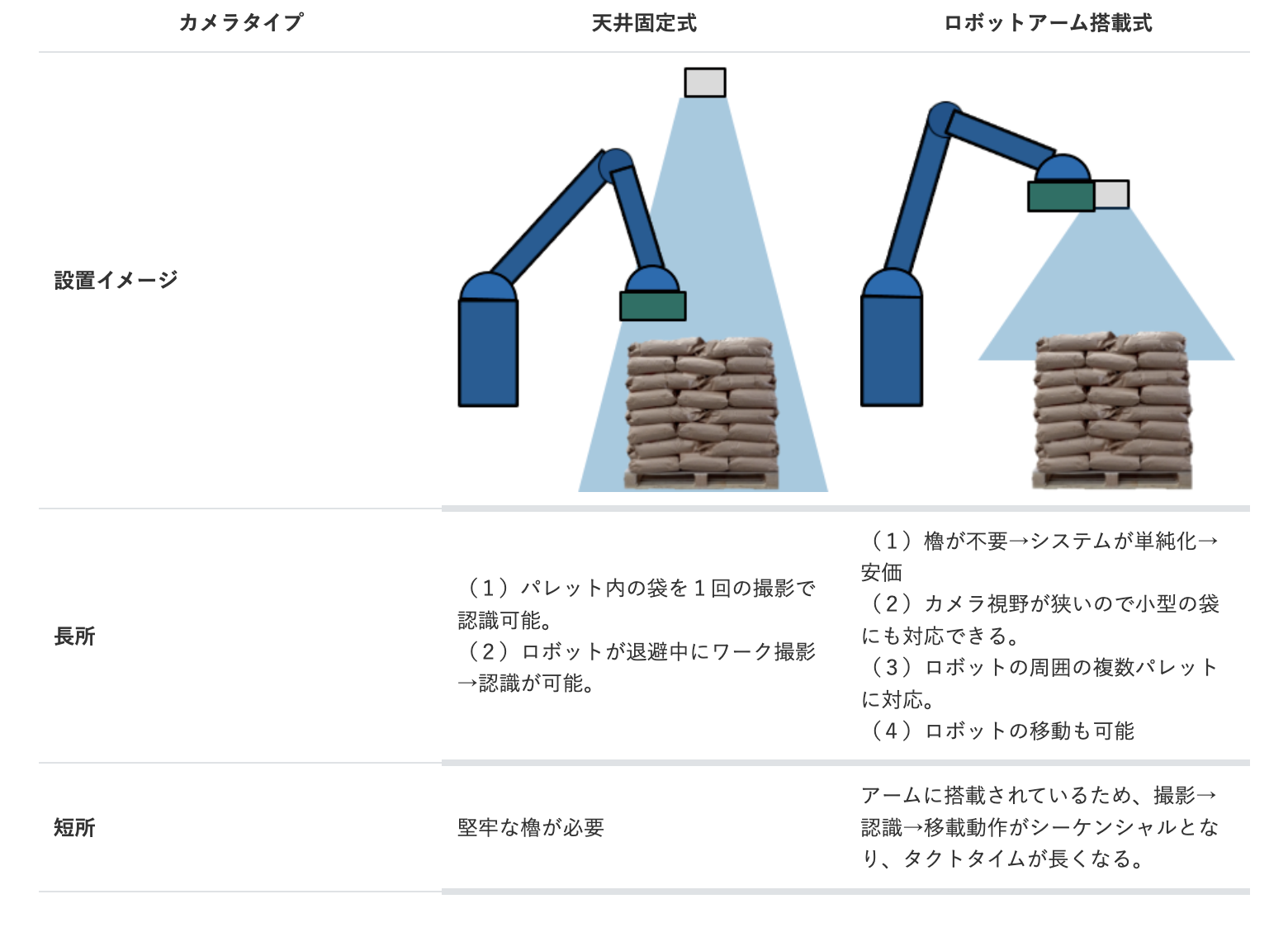
3Dビジョン設置プラン
作業環境に応じた3Dロボットビジョンを提供 固定ビジョン、ハンドアイビジョンのいずれも対応可能です。
仕様表
| 仕様項目 | 内容 |
|---|---|
| 認識時間 | 撮影→点群前処理:0.7〜1.0秒
AI認識:約0.6秒 点群による検証時間:0.5〜2.0秒 |
| 袋の種類 | 袋サイズ、袋素材、色、印刷を問わない。 |
| 対応ロボット | 安川電機、FANUC、川崎重工業、デンソー、不二越、UR、三菱電機他 |
| 新規ワーク(袋)の学習 | お客様のワーク(袋)追加することで認識率が向上します。 |
| キャリブレーション | 専用キャリブレーションボードによる自動誤差補正。 |